

Our Robots
2022-23 Season

C.R.A.B. Bot
“CRAB-bot” (Coordinated, Rotated, Actuated, Boosted-up bot) was Team Loose Screws’s robot for the 2022-2023 POWERPLAY competition. Our robot was built on a relatively large and stable chassis and is designed to accommodate the larger lifting mechanism and sideways movement that earned the bot its name. The lifting mechanism utilizes a DC motor that wraps up and unravels rope along a spool, controlling the drawer slides that vertically extend and retract. The grabbing mechanism is 3d -printed and uses one servo that controls gears that open and close both arms of the claw, angled sideways to accommodate the shape of the cone.
For us, it was fairly straightforward to define and initialize the five DC motors and the servo. For the autonomous portion, our goal was to have the robot sense our custom signal sleeve and park in the correct location, which earned an impressive 20 points when successfully employed.

BENSON
For the PowerPlay competition, our team created a robot that can successfully read a signal sleeve and park in the correct area and a controller-based TeleOp.
BENSON’s grabbing mechanism consists of a two-part system. First, cones are positioned in front of the robot through the use of a plow. The cones are then collected by a servo motor collection mechanism and lifted upwards. Our robot’s linear slides allow us to smoothly and efficiently control the vertical movement of cones. The robot uses a gear system with a ratio in order to increase the speed of our collection mechanism. BENSON robot uses Mecanum wheels in order to move forward and laterally. This way, it can precisely navigate the field from any orientation.

Her Majesty
Our robot is designed for practical all-around use. We designed our robot without a particular area of focus so we didn’t compromise its other abilities. We rebuilt the frame to be significantly more compact. It now had room to spare, so we could fit the drawer slide and grabbing mechanism required to effectively complete the challenge. The grabbing mechanism used two plates attached by servos, covered in high-friction rubber.
Her Majesty’s TeleOp consisted of two controllers. one of which controlled the wheels, the other of which controlled the lifting mechanism.

CRAB-Bot in the pickup position

BENSON’s lifting mechanism’s maximum height
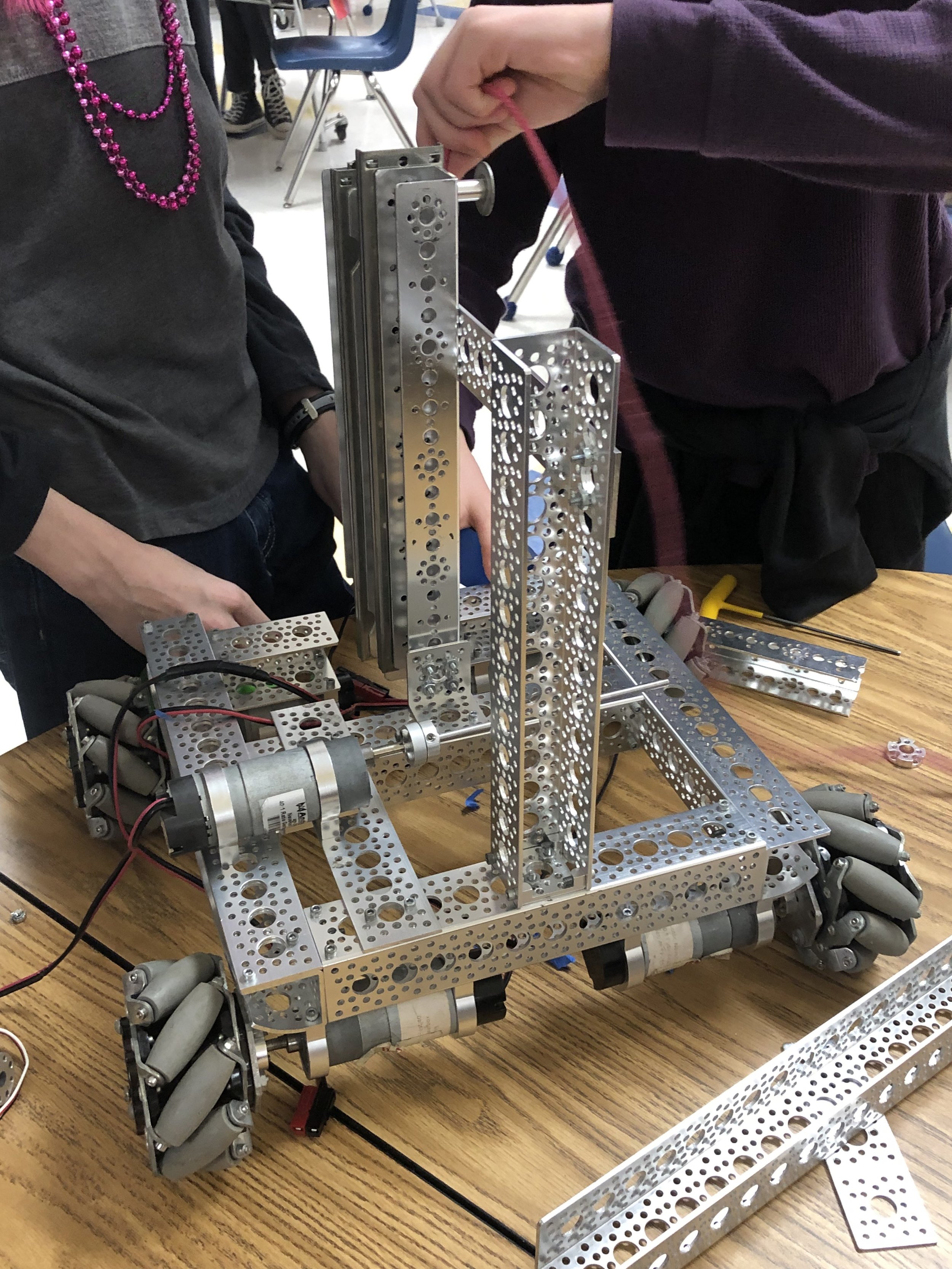
Her Majesty’s chassis under construction

CRABbot’s 3d-printed grabbing mechanism

BENSON cables being managed

Her Majesty’s rotating plate grabbing mechanism